CalliBot Anleitung
Diese Anleitung beschreibt das Remote Controlled Car "CalliBot". Der Antrieb erfolgt über zwei Getriebe-Motore, als Spannungversorgung dient ein Akku oder optional eine Powerbank bzw. eine 9V-Batterie. Das Herzstrück ist ein Calliope, als Steuerung dient ein zweiter Calliope. Die Bodenplatte wird aus einer 4mm Sperrholzplatte gelasert.
Hardware
Die Stückliste für CalliBot
- 2 x Calliope
- 1 x Sperrholzplatte DINA4 4mm
- 6 x Platinenhalter (3D-Druck)
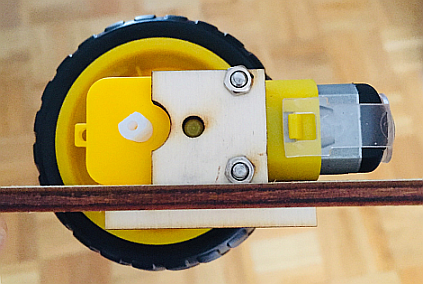
- 2 x Getriebemotore mit Räder
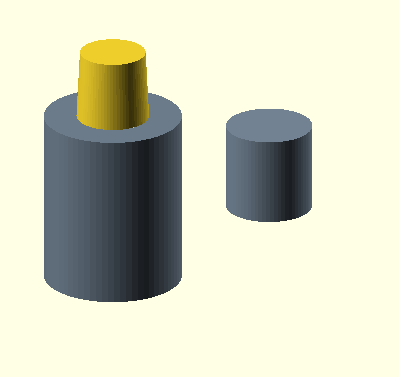
- 1 x Lenkrolle mit Abstandsplatte
- 1 x Dual-H-Brücke-DC-Motorantrieb L298N
- 1 x JST-Buchse 4pol mit 15cm LiY0,25/AWG24
- 4 x M3x30 Senkkopfschrauben
- 4 x M3 Muttern
- 1 x 9V Clipp
- 1 x 9V Akku (optional eine Powerbank oder 9V Batterie)
- Kleinmaterial, Schrauben, Muttern, Klemmen, Platinenstecker, Schaltdraht
Aufbau und Montage
Der Aufbau und die Montage von CalliBot ist in mehrere Schritte unterteilt.
Schritt 1: Die Sperrholzplatte lasern
Die Lasercutter Grundplatte:
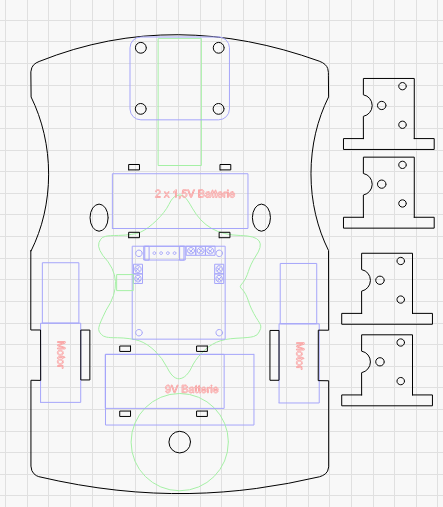
Schritt 2: Acht Platinenhalter drucken.
Die Platinenhalter tragen den Calliope und die H-Brücke. Sie werden auf die Bodenplatte geklebt.
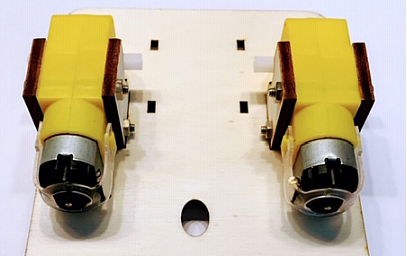
Schritt 3: Die zwei Getriebemotore auf die Bodenplatte montieren (Senkkopfschrauben M3x30).
Die Lötfahnen zeigen jeweils nach innen!
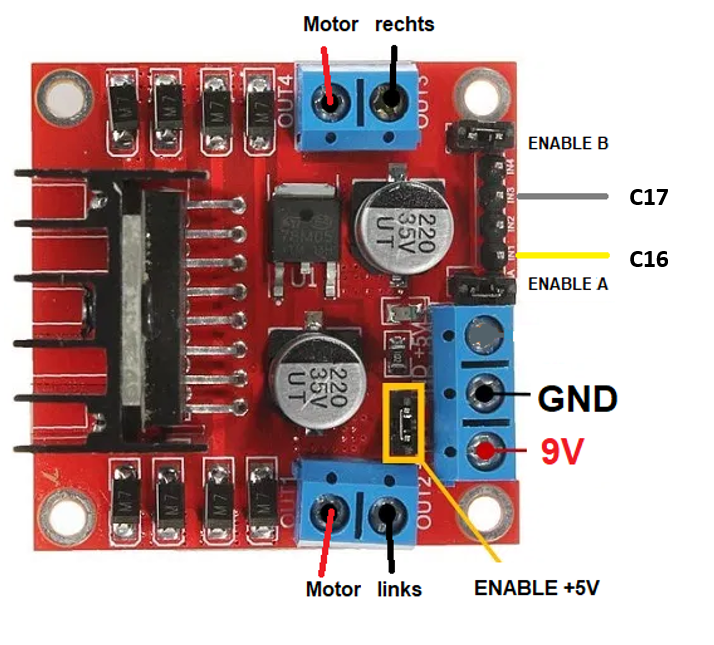
Schritt 4: Die Bauelemente verdrahten.
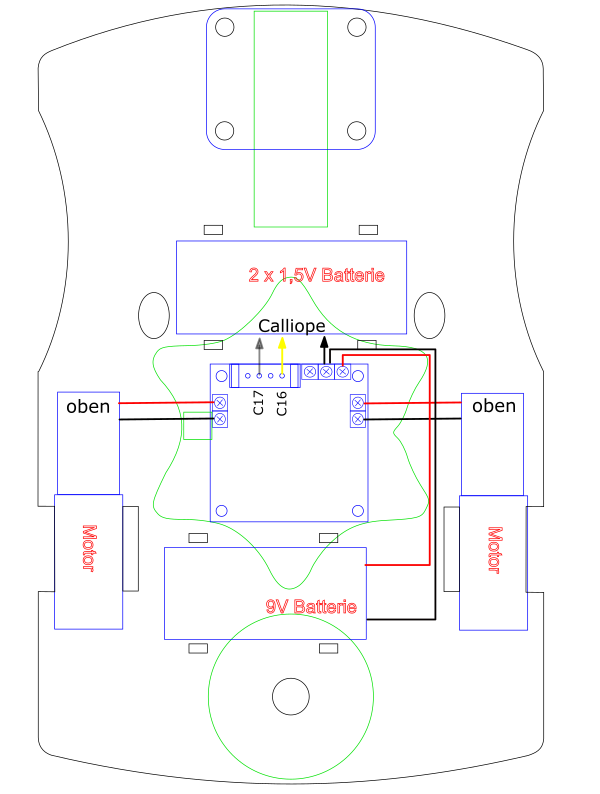
L298N Verdahtung:
Schritt 5: Sender und Empfänger programmieren
Im Online-Editor Open-Roberta werden Sender und Empfänger programmiert.
CalliBot Sender

CalliBot Empfänger

Schritt 6: Befestige die Nadel und den Luftballon am CalliBot
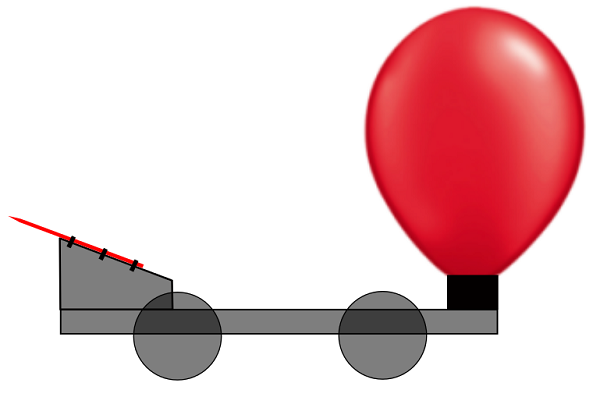
Versuche in der Challenge die anderen Luftballons zum platzen zu bringen!
Fertig!