Robotik
Greifarm / Robo-Arm
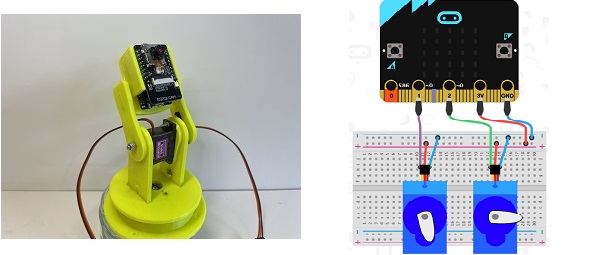
mit Schrittmotore und Servomotore
Greifer
Robo Arm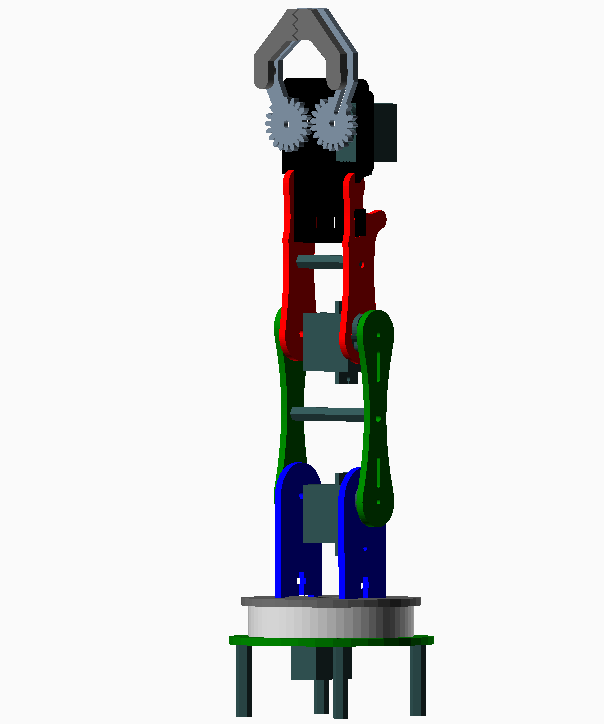
Montage Anleitung
Einleitung
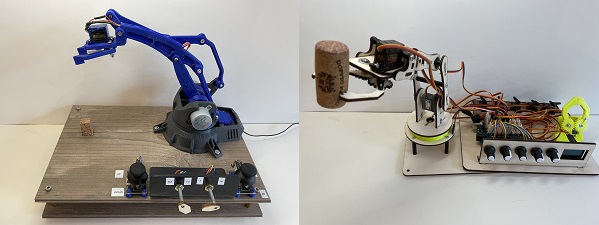
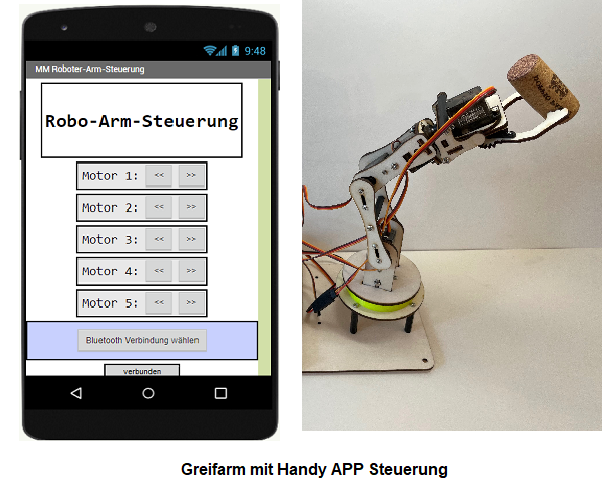
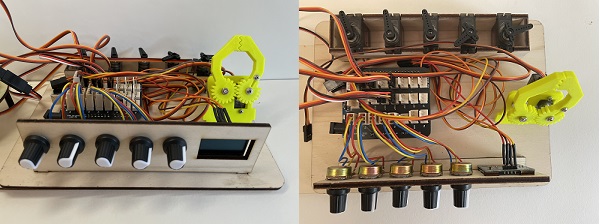
Diese Anleitung beschreibt den Aufbau eines Robo Arm aus 3mm Sperrholz mit einem Arduino NANO. Die Gelenke der Greifarme werden mit Servo-Motore angetrieben, die Ansteuerung erfolgt über einen Arduino NANO und vier Potis. Optional ist eine Ansteuerung über eine APP und die Drehwinkelanzeige mit einen OLED-Display möglich.
Stückliste
Das benötigen wir für den Robo Arm:
- 1 x Sperrholzplatte 3mm x 600x300
- 4 x Digital Servo mg996r Metallgetriebe
- 1 x Arduino NANO
- 1 x NANO Shield
- 4 x Potis 10k
- 1 x 50cm Litze
- 4 x Platinenstecker 3pol
- 1 x Steckenetzteil 5V, alternativ: 1x18650 Akku mit Case
- 5 x M2 x 10 Schrauben
- 5 x M2 Mutter
- 4 x M2,5 x 10 Schrauben
- 12 x M3 x 10 Schrauben
- 1 x M3 x 20 Schraube
- 5 x M3 Mutter
- 5 x M3 Mutter selbstsichernd
- 1 x M3 x 30 Abstandshalter
- 1 x M3 x 40 Abstanshalter
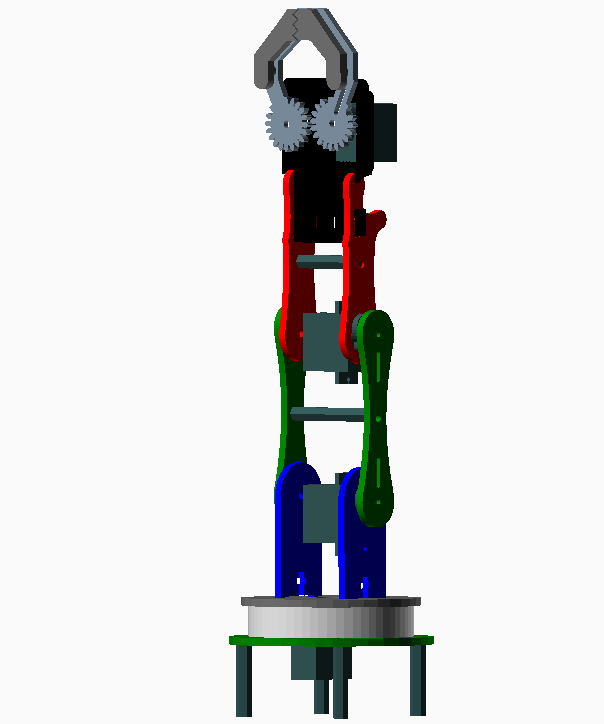
Robo Arm Montage - Gesamtansicht
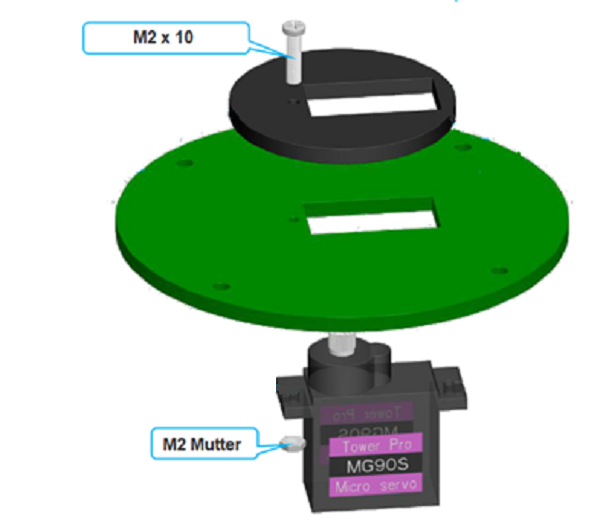
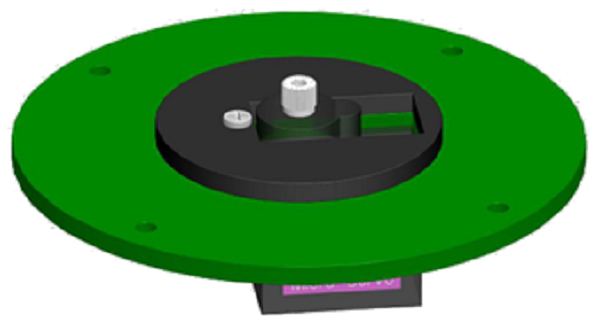
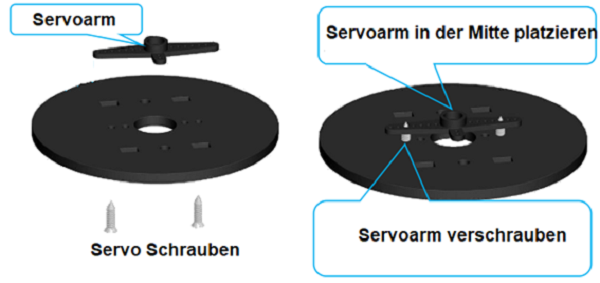
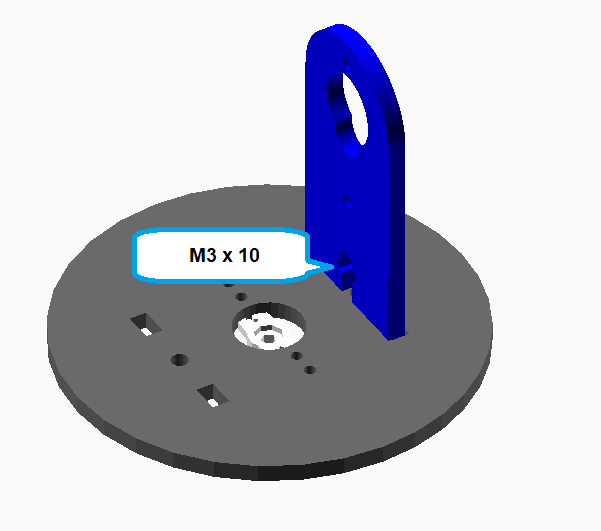
Drehteller Montage


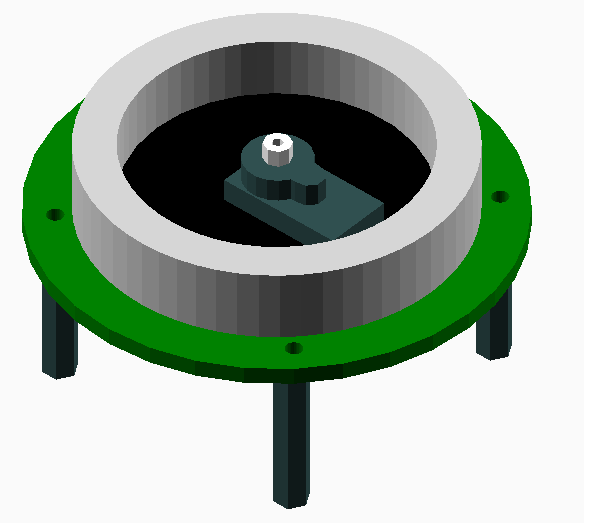
Axiallager Montage

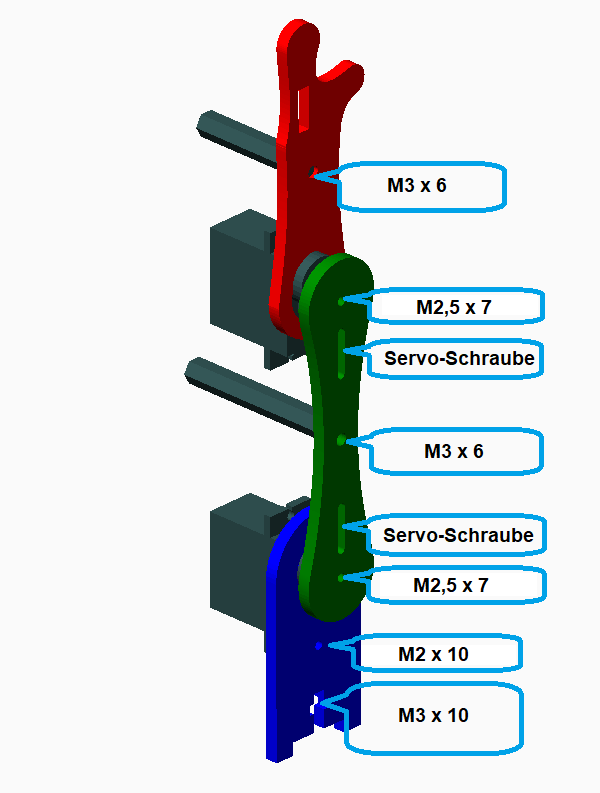
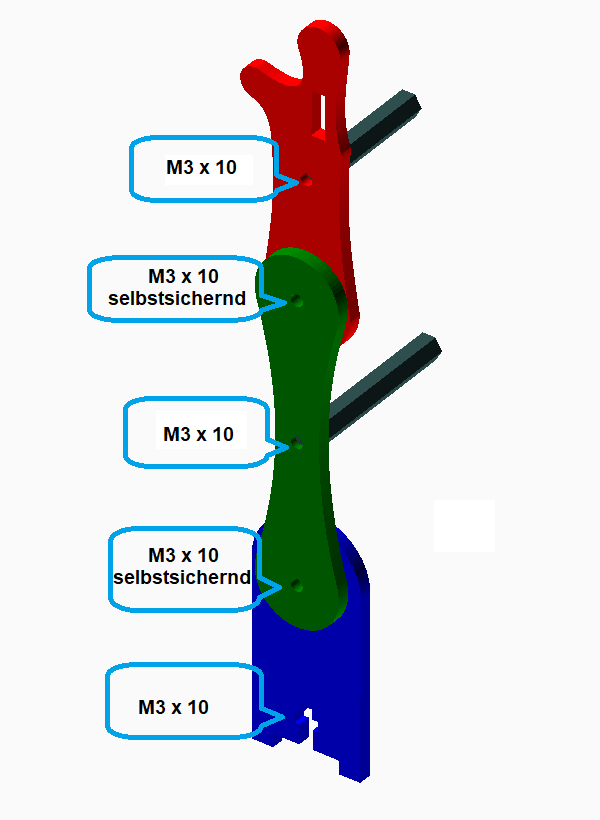
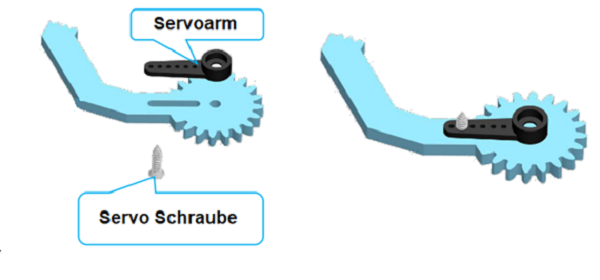
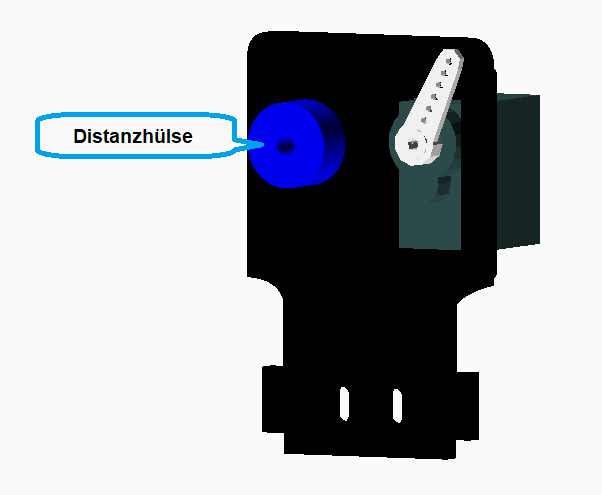
Gelenkarm Montage
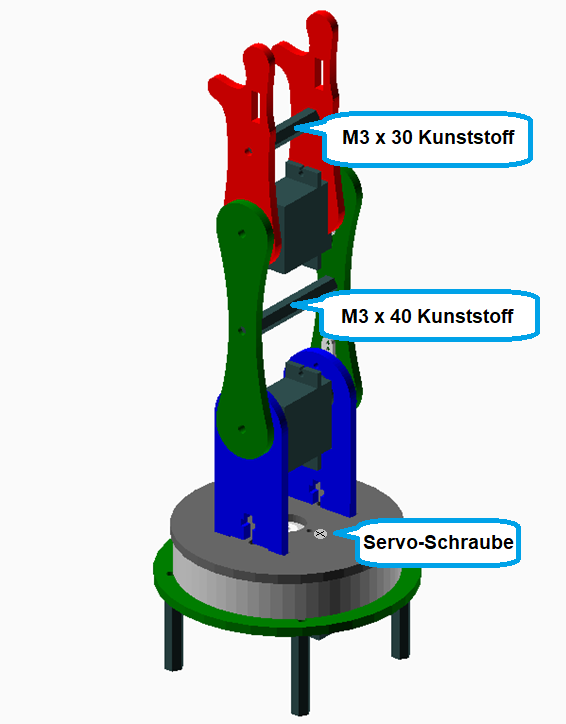
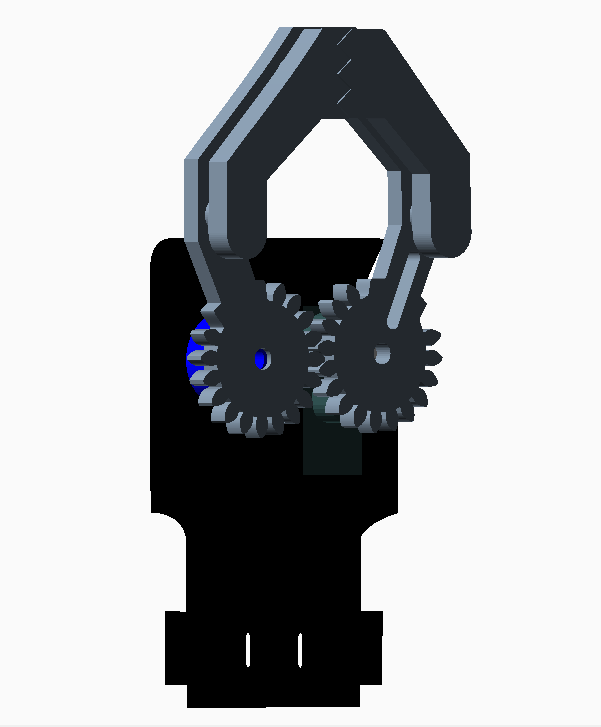
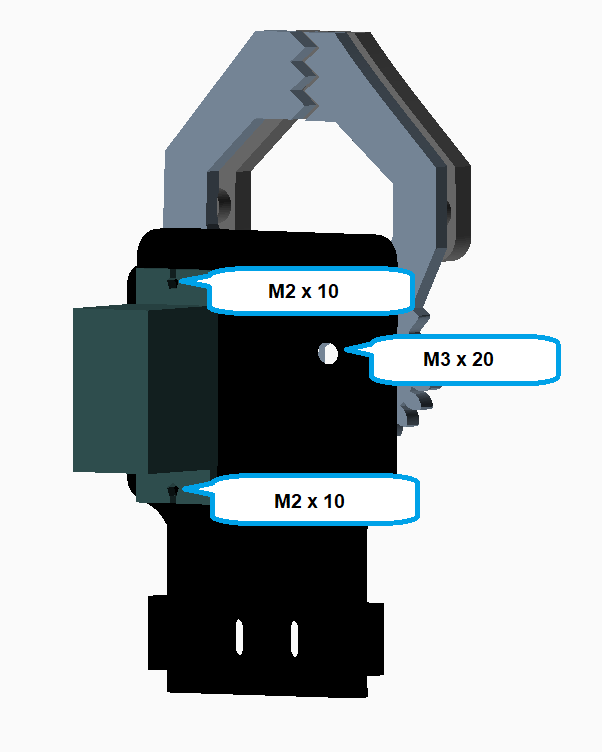
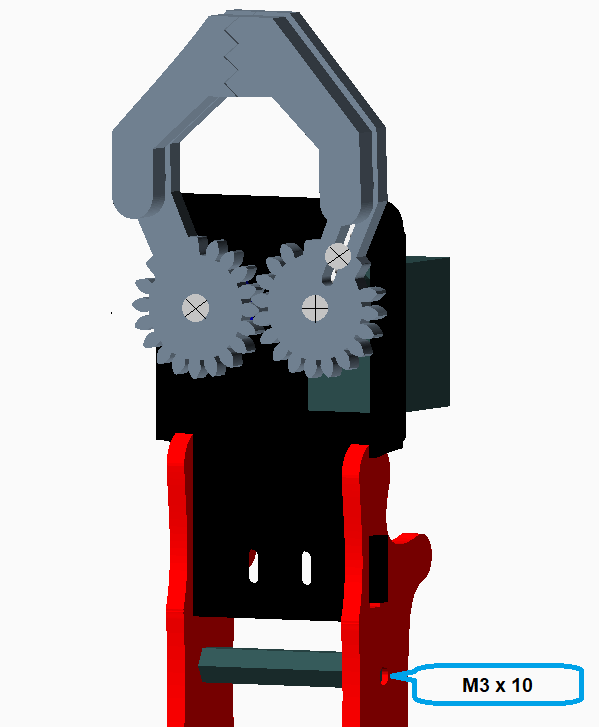
Greifer Montage
Fertig!
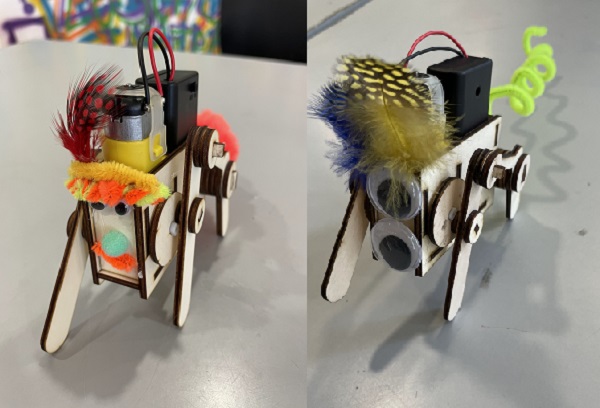
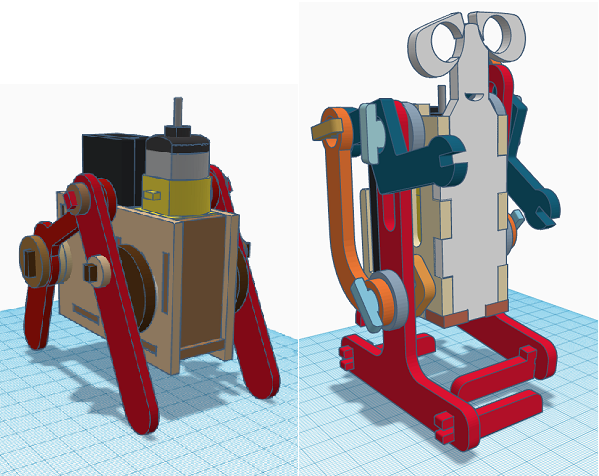
Robi
Baue einen Roboter, lerne ihn laufen und
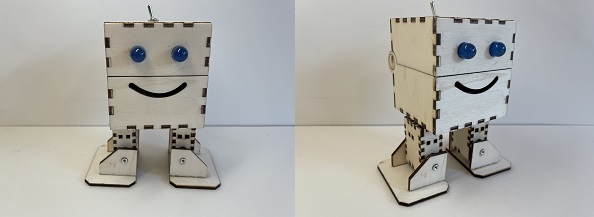
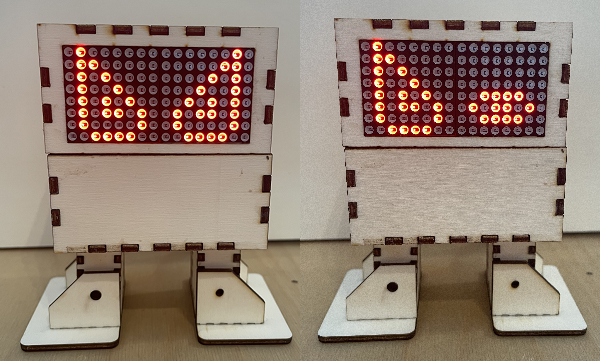
entwerfe dein eigenes Design

Robotik kennenlernen
Komponenten, Ansteuerung, Programmierung
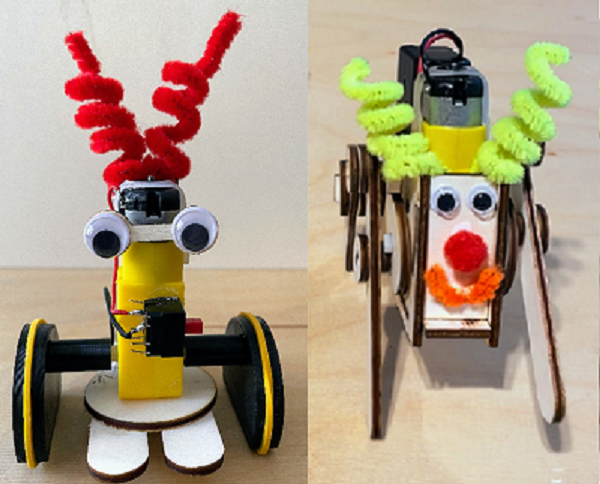
Hubsi, Egone und Johnny
Kleine Bots mit Getriebemotor
ESP32 Cam
Mit Drehteller und micro:bit Steuerung