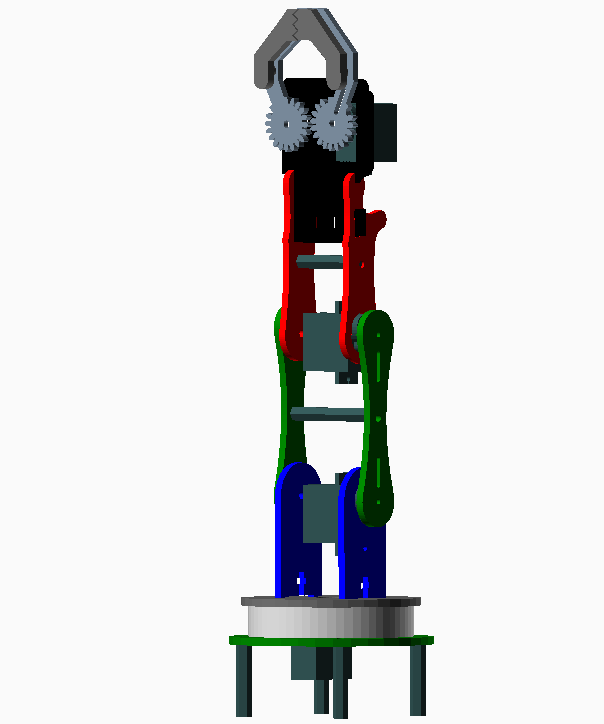
Greifarm / Robo-Arm
mit Schrittmotore und Servomotore
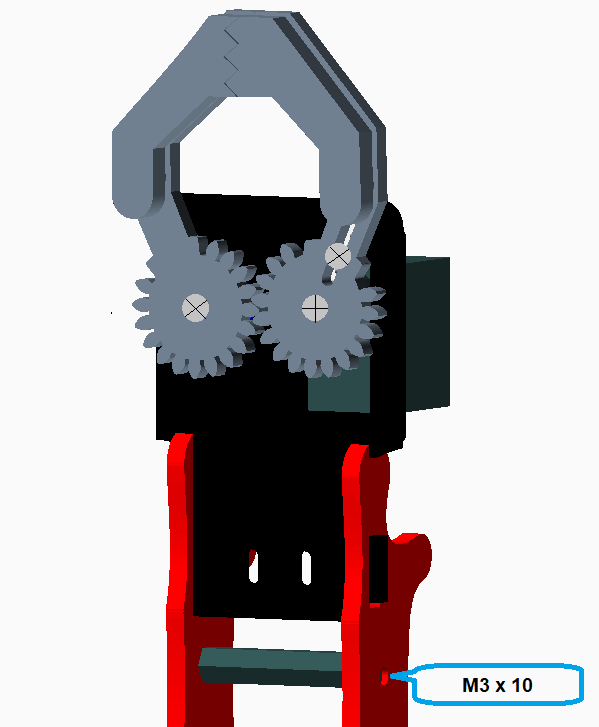
Greifer
Robo Arm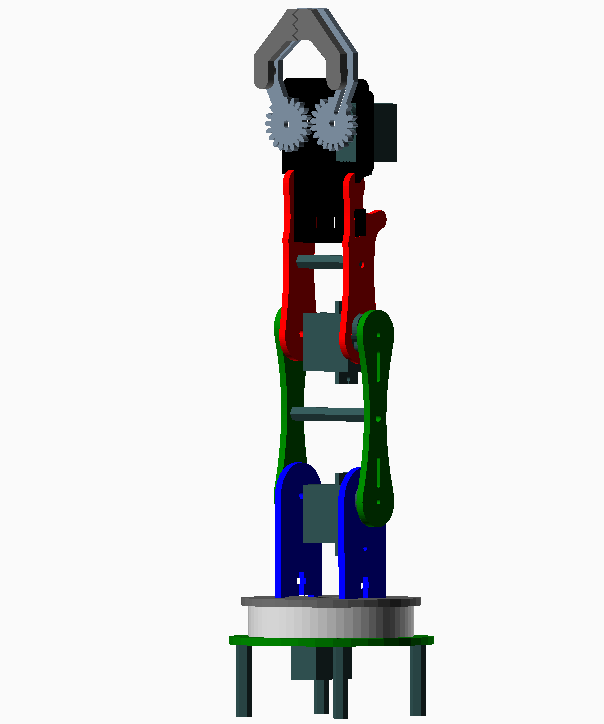
Montage Anleitung
Einleitung:
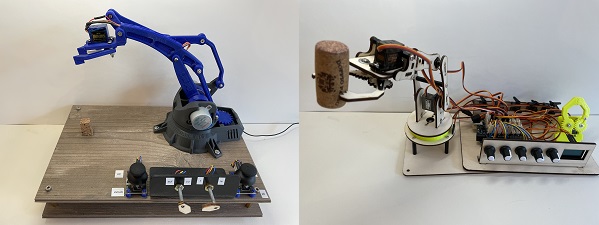
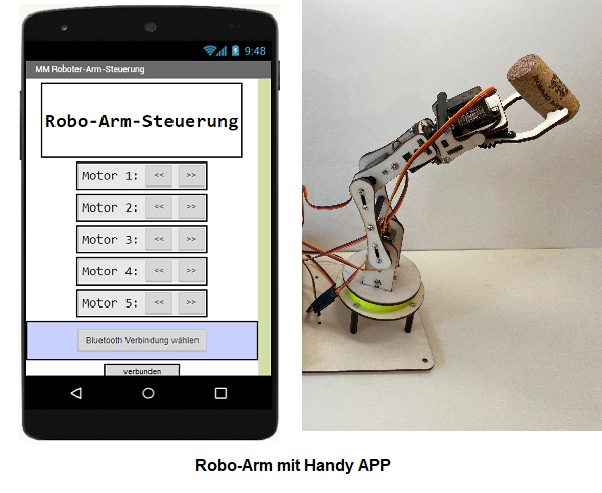
Diese Anleitung beschreibt den Aufbau eines Robo Arm aus 3mm Sperrholz mit einem Arduino NANO. Die Gelenke der Greifarme werden mit Servo-Motore angetrieben, die Ansteuerung erfolgt über einen Arduino NANO und vier Potis. Optional ist eine Ansteuerung über eine APP und die Drehwinkelanzeige mit einen OLED-Display möglich.
Stückliste:
Das benötigen wir für den Robo Arm:
- 1 x Sperrholzplatte 3mm x 600x300
- 4 x Digital Servo mg996r Metallgetriebe
- 1 x Arduino NANO
- 1 x NANO Shield
- 4 x Potis 10k
- 1 x 50cm Litze
- 4 x Platinenstecker 3pol
- 1 x Steckenetzteil 5V, alternativ: 1x18650 Akku mit Case
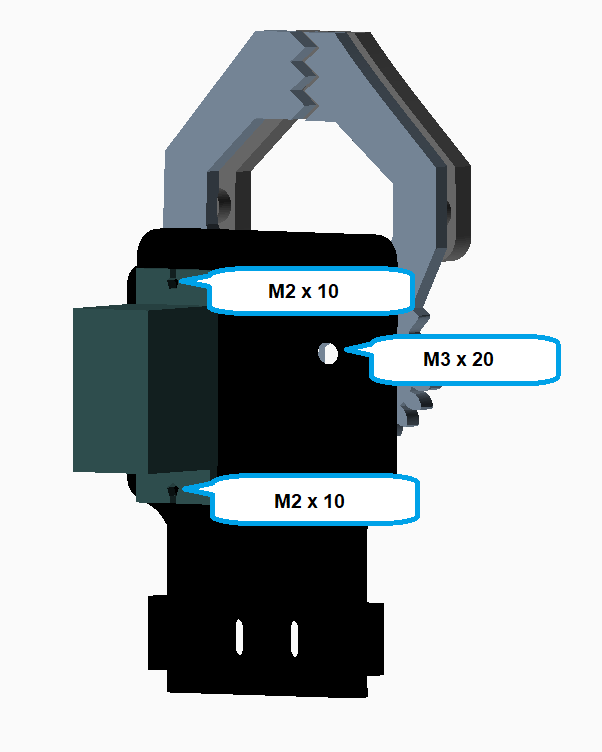
- 5 x M2 x 10 Schrauben
- 5 x M2 Mutter
- 4 x M2,5 x 10 Schrauben
- 12 x M3 x 10 Schrauben
- 1 x M3 x 20 Schraube
- 5 x M3 Mutter
- 5 x M3 Mutter selbstsichernd
- 1 x M3 x 30 Abstandshalter
- 1 x M3 x 40 Abstanshalter
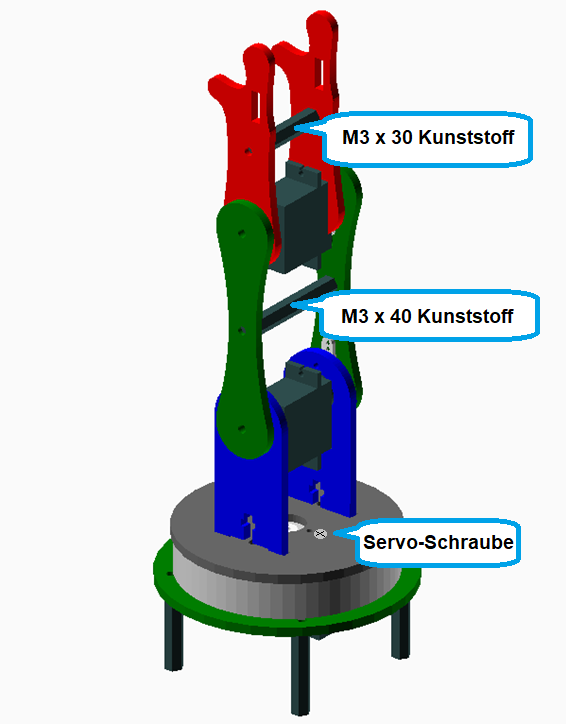
Robo Arm Montage - Gesamtansicht
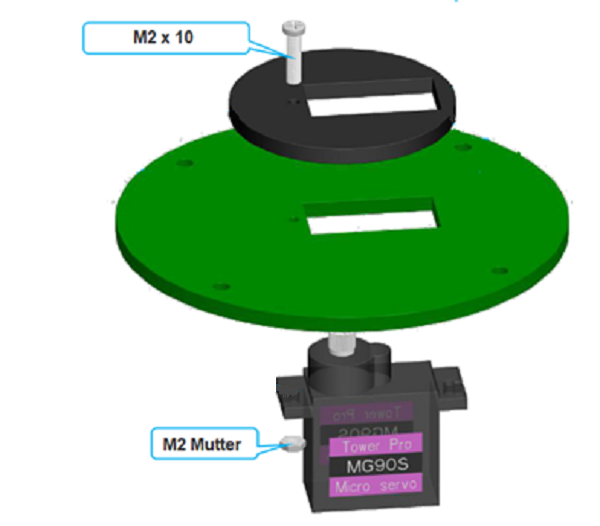
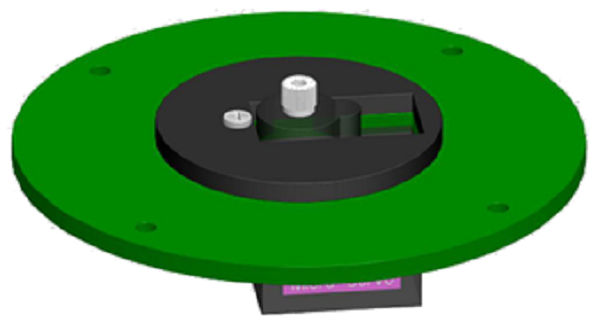
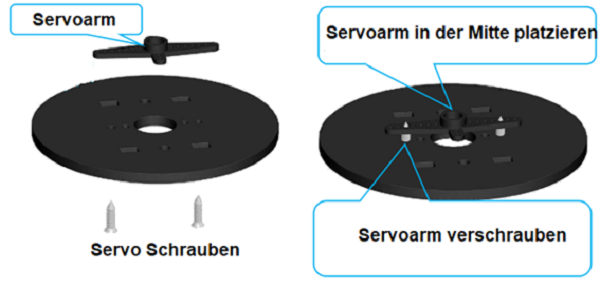
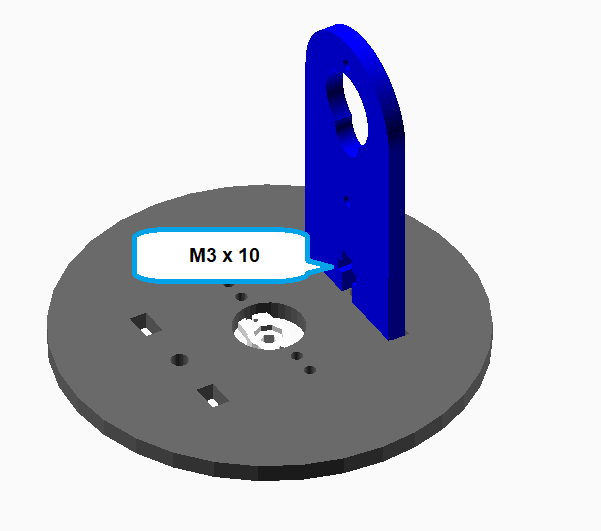
Drehteller Montage
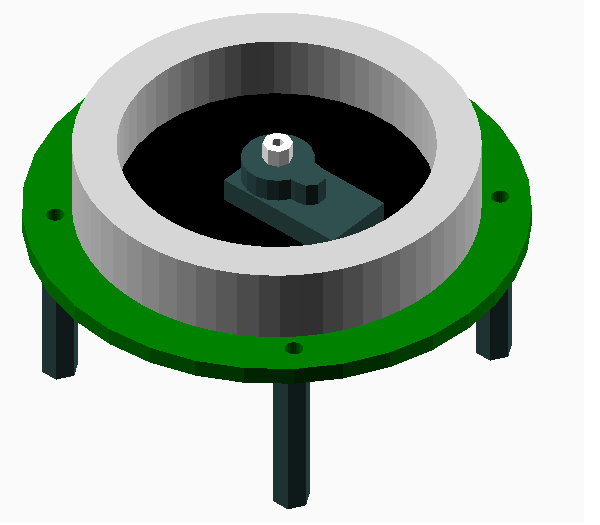
Axiallager Montage
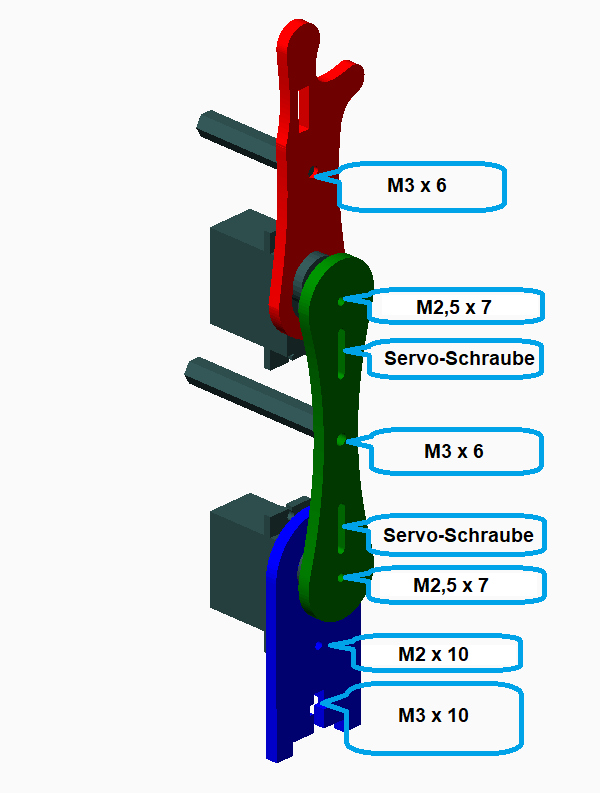
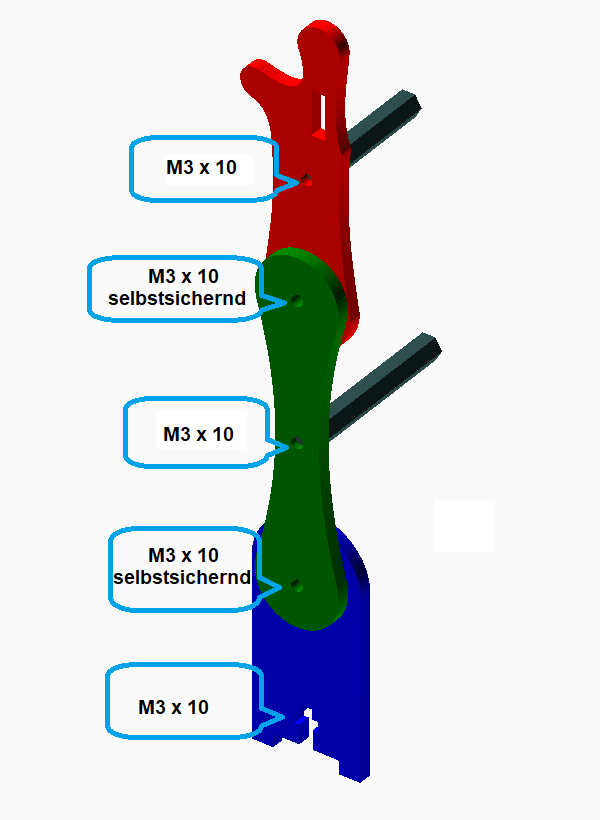
Gelenkarm Montage
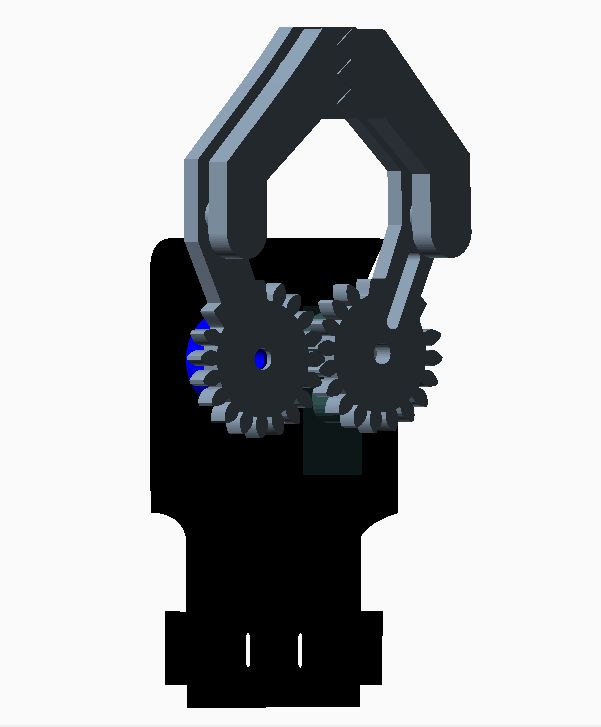
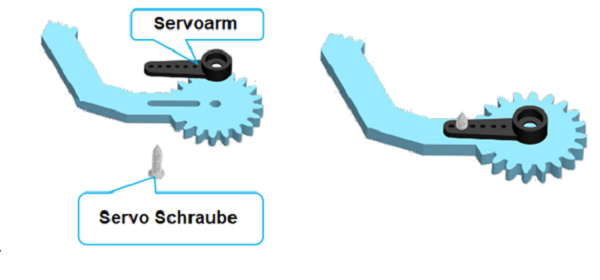
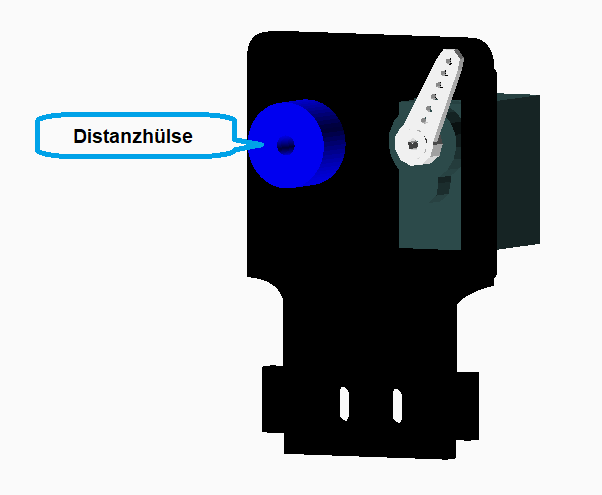
Greifer Montage