CamCar Anleitung
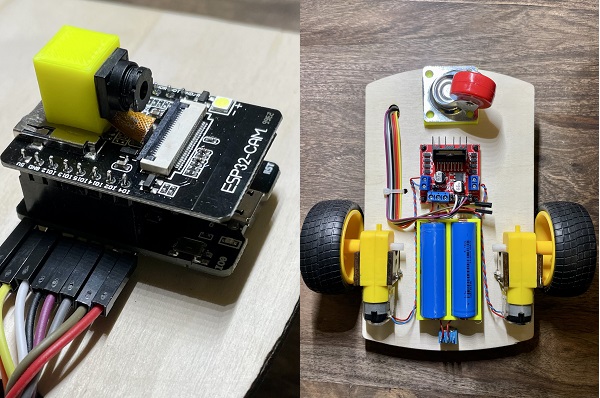
Diese Anleitung beschreibt den Remote Controlled Car Robot "Speedy" mit Handy-Steuerung und Web-Cam. Der Antrieb erfolgt über zwei Getriebe-Motore, als Spannungversorgung dienen zwei Akkus oder optional eine Powerbank bzw. eine 9V-Batterie. Das Herzstrück ist ein ESP32-CAM, die Bodenplatte wird aus einer 4mm Sperrholzplatte gelasert.
Hardware
Die Stückliste für Speedy
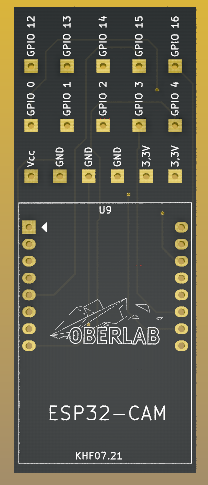
- 1 x ESP32-CAM
- 1 x ESP32-CAM Shield
- 1 x Sperrholzplatte DINA4 4mm
- 6 x Platinenhalter (3D-Druck)
- 2 x Getriebemotore mit Räder
- 1 x Lenkrolle mit Abstandsplatte
- 1 x Schalter
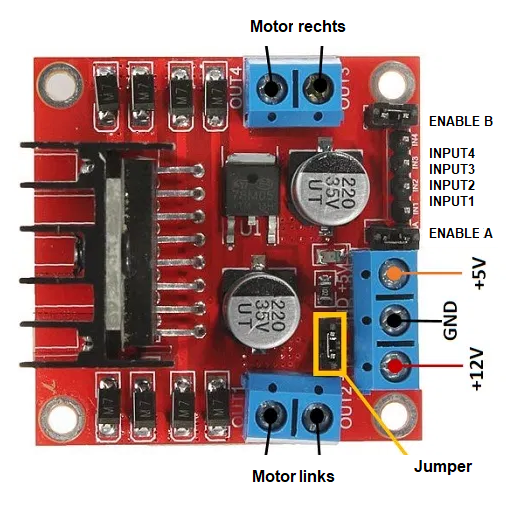
- 1 x Dual-H-Brücke-DC-Motorantrieb L298N
- 1 x JST-Buchse 4pol mit 15cm LiY0,25/AWG24
- 4 x M3x30 Senkkopfschrauben
- 4 x M3 Muttern
- 2 x 18650 Akkus mit Akkucase (optional eine Powerbank oder 9V Batterie)
- Kleinmaterial, Schrauben, Muttern, Klemmen, Platinenstecker, Schaltdraht
Aufbau und Montage
Der Aufbau und die Montage von Speedy ist in mehrere Schritte unterteilt.
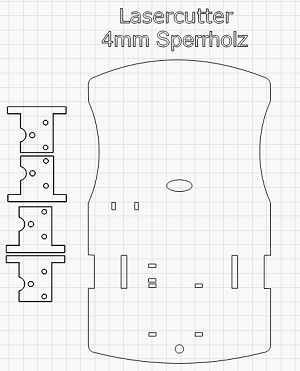
Schritt 1: Die Sperrholzplatte lasern
Verwende die Lasercutter Vorlage:
Lasercutter Vorlage
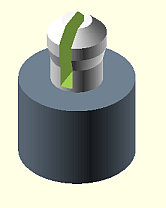
Schritt 2: Acht Platinenhalter drucken.
Die Platinenhalter tragen den ESP32 und die H-Brücke. Sie werden auf die Bodenplatte geklebt.
3D-Druckvorlage PINs
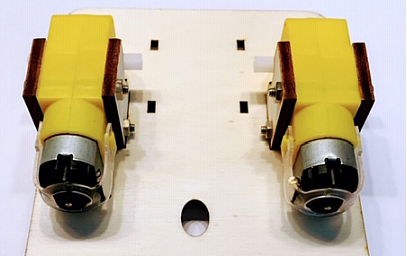
Schritt 3: Die zwei Getriebemotore auf die Bodenplatte montieren (Senkkopfschrauben M3x30)
Die Lötfahnen zeigen jeweils nach innen!
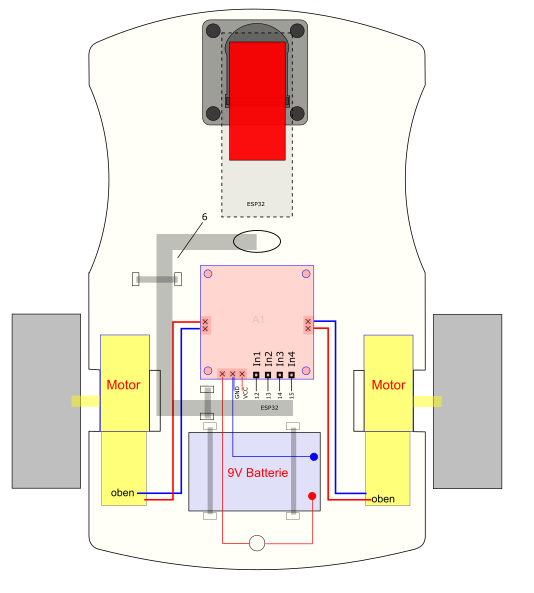
Schritt 4: Die Bauelemente nach Schaltplan verdrahten.
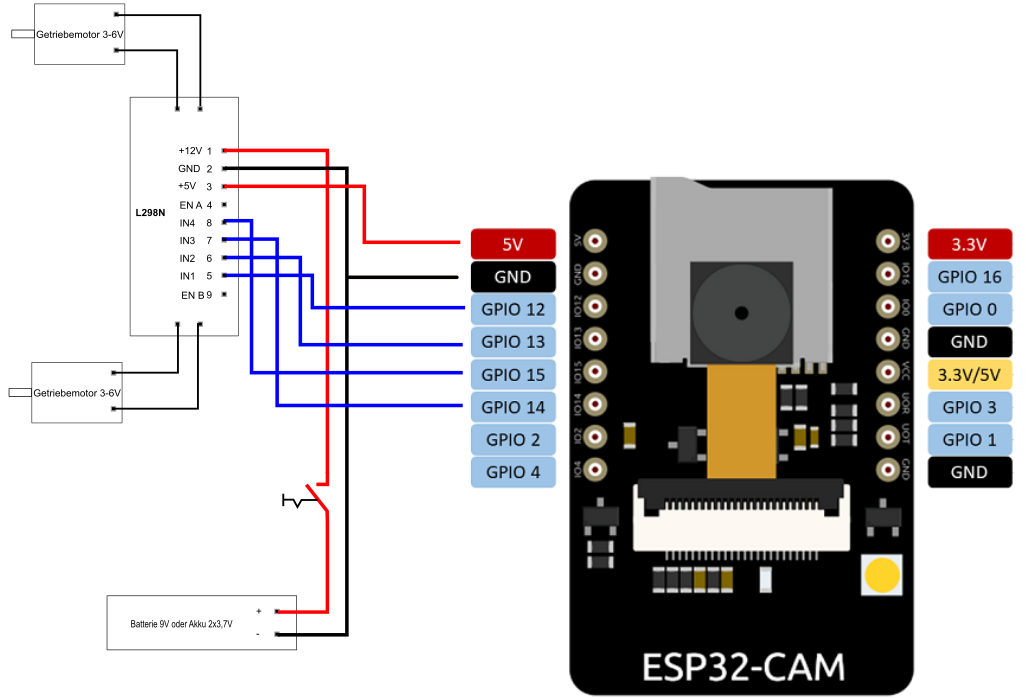
ESP32-CAM - L298N Verdahtung:
| L298N | ESP32 |
| IN1 | 12 |
| IN2 | 13 |
| IN3 | 14 |
| IN4 | 15 |
| 5V | 5V |
| GND | GND |
Den ESP32 auf das ESP-Shield löten und nach Schaltplan verdrahten.
L298N Verdahtung
Schritt 5: Im Programm die WLAN-Daten eintragen
dann das Programm 1 oder Programm 2 (feste IP-Adresse) in den ESP32-CAM laden und einen Funktionstest durchführen
Schritt 6: Das Akku/Batterie-Case und den Motor-Treiber L298N auf die Bodenplatte montieren
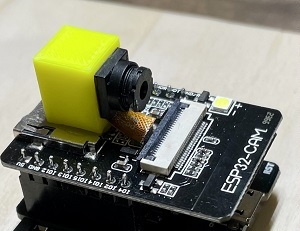
Den ESP32-CAM mit dem Shield auf die Oberseite montieren.
ESP32-CAM mit der Halterung:
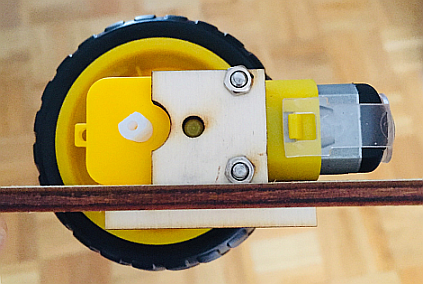
Schritt 7: Das vordere Lenkrad montieren und die beiden Räder auf die Getriebemotore stecken
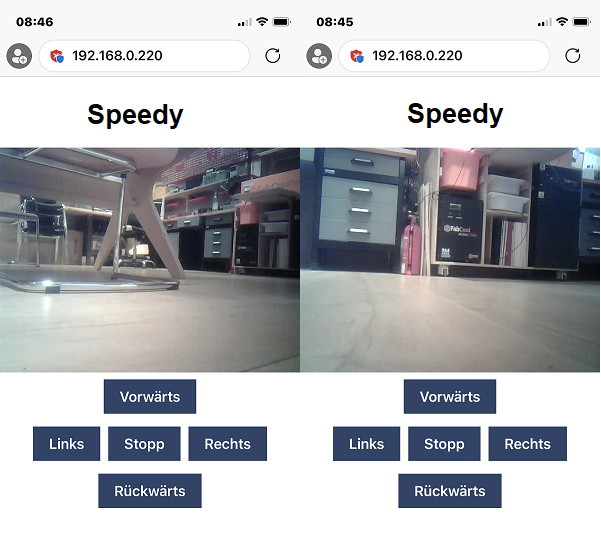
Schritt 8: Funktionstest.
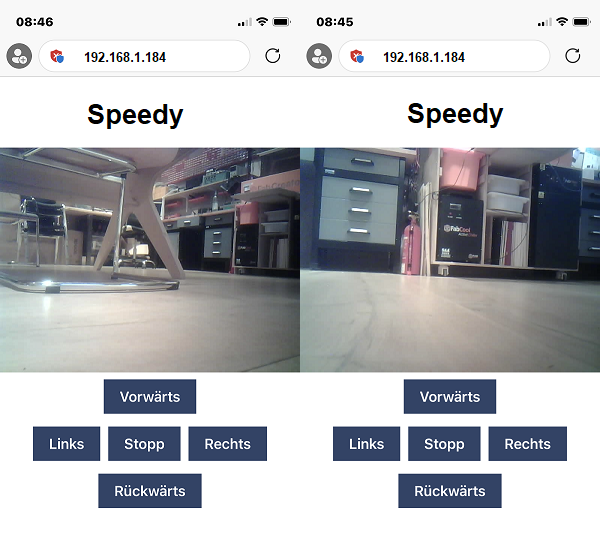
Mit dem Seriellen Monitor der Arduino IDE die IP-Adresse des WEB-Servers auslesen und im Browser den WEB-Server aufrufen z.B. 192.168.1.184 ...185...186...
Fertig!